What Is Edge Computing in Autonomous Vehicles?
Edge computing in autonomous vehicles means processing critical driving data inside or near the vehicle instead of sending all information to a remote cloud server.
An autonomous vehicle does not drive based on one simple signal. It receives data from cameras, radar, LiDAR, ultrasonic sensors, GPS, inertial sensors, vehicle control units, and sometimes V2X communication systems. This data must be collected, filtered, compared, and acted on almost instantly.
For example, when a pedestrian steps into the road, the vehicle cannot wait for sensor data to travel to a distant cloud platform and return with a decision. The onboard computing system must identify the object, estimate its movement, evaluate risk, and trigger braking or steering control in real time.

Why Do Autonomous Vehicles Need Edge Computing?
Autonomous vehicles need edge computing because driving decisions are time-sensitive. A self-driving car must understand its environment continuously, not occasionally.
A modern autonomous driving system may need to detect lane markings, traffic lights, vehicles, cyclists, pedestrians, road signs, construction zones, and unexpected obstacles. The road scene in front of the vehicle can be different every fraction of a second.
1. It reduces response time.
The vehicle can process data locally and respond faster. This matters for emergency braking, collision avoidance, lane keeping, and adaptive cruise control.
2. It lowers dependence on network connectivity.
A vehicle may enter tunnels, rural areas, underground parking lots, or dense urban streets with poor signal quality. Local processing allows key driving functions to continue even when the network is unstable.
3. It protects data efficiency.
Raw camera, radar, and LiDAR data can be very large. Sending everything to the cloud would require high bandwidth and may increase cost. Edge systems can process raw data locally and send only useful summaries or selected events.
4. It supports functional safety.
Autonomous driving requires predictable electronic behavior. Edge computing allows safety-critical functions to be handled by local hardware, software, and control logic designed for automotive reliability.
5. It improves user experience.
Fast local decisions create smoother braking, more natural acceleration, better lane control, and quicker response to nearby vehicles.
For autonomous vehicles, edge computing is not only a data processing method. It is part of the vehicle safety architecture.
How Does Edge Computing Reduce Latency in Self-Driving Cars?
Latency is the delay between data input and system response. In autonomous driving, latency includes sensor capture time, data transmission time, processing time, decision-making time, and actuator response time.
Edge computing reduces latency by keeping critical computation close to the vehicle sensors and control units. The shorter the data path, the faster the decision can be made. Its working path including:
1. A front camera captures an object ahead.
2. The edge AI processor analyzes the image.
3. The system identifies the object as a pedestrian.
4. Sensor fusion compares camera data with radar or LiDAR data.
5. The driving controller estimates distance and movement.
6. The vehicle decides whether to brake, slow down, or change path.
If this process depends on cloud communication, network delay becomes a serious variable.
How Does Edge Computing Process Sensor Data from Cameras, LiDAR, Radar, and Ultrasonic Sensors?
Autonomous vehicles rely on multiple sensor types because each sensor has its own strengths.
Data Preprocessing
Raw sensor signals are cleaned, synchronized, filtered, and prepared for analysis. Noise reduction and signal conditioning are important at this stage.
Object Detection
The system identifies objects such as vehicles, people, bicycles, road cones, and lane boundaries.
Object Tracking
The vehicle tracks object movement over time. A car next to the vehicle, for example, is not only detected once; its speed, direction, and position are continuously updated.
Sensor Fusion
Data from different sensors is combined to create a more reliable view of the environment. If radar detects a moving object and the camera identifies it as a motorcycle, the system can make a more confident decision.
Path Planning Support
Processed data is sent to the planning system. The vehicle decides whether to keep speed, brake, turn, avoid an object, or prepare for a lane change.
This entire flow depends on high-speed electronic hardware, reliable PCB design, stable power delivery, efficient heat dissipation, and robust communication between modules.
What Is the Role of Edge AI in Autonomous Driving?
Edge AI means running artificial intelligence algorithms directly on edge hardware, such as automotive AI processors, GPUs, NPUs, or dedicated SoCs inside the vehicle. In autonomous driving, edge AI is used for perception, prediction, and decision support.
Edge AI is valuable because it brings machine learning closer to the real driving environment. Instead of depending on a cloud AI platform for every judgment, the vehicle uses onboard AI models to process data directly.
- Faster local inference
- Lower network dependency
- Better data privacy control
- More stable operation in changing environments
- Stronger support for real-time driving functions
However, edge AI hardware must be carefully designed because AI processors can generate significant heat. They also require stable voltage regulation, high-speed data routing, controlled impedance, electromagnetic compatibility, and automotive-grade reliability.
How Does Edge Computing Support Sensor Fusion and Real-Time Decision-Making?
Sensor fusion is one of the most important functions in autonomous driving. A single sensor may miss information or produce uncertain results under specific conditions. Sensor fusion improves confidence by combining multiple data sources.
For example, a camera may detect an object ahead, but it may struggle in heavy glare. Radar may confirm that the object is moving and measure its relative speed. LiDAR may provide 3D position data. Together, these sensors give the vehicle a clearer understanding of the scene.
Edge computing supports sensor fusion by processing data locally and quickly. The system must align sensor timestamps, compare object positions, remove false detections, and generate a unified environmental model. This unified model is then used for real-time decision-making.
Edge Computing vs Cloud Computing in Autonomous Vehicles: What Is the Difference?
Edge computing and cloud computing are both useful in autonomous vehicle systems, but they serve different purposes.
Edge computing handles real-time and safety-related processing. Cloud computing handles large-scale analysis, data storage, model training, fleet management, and software updates.
| Comparison Point | Edge Computing | Cloud Computing |
|---|---|---|
| Processing Location | Inside vehicle or nearby infrastructure | Remote data center |
| Main Strength | Low latency and real-time response | Large-scale storage and training |
| Typical Use | Object detection, sensor fusion, driving decisions | AI model training, map updates, fleet analytics |
| Network Dependence | Lower | Higher |
| Role in Safety-Critical Control | Very important | Supportive, not usually direct control |
For autonomous vehicles, the best architecture is not edge-only or cloud-only. It is a hybrid model.
The vehicle uses edge computing for immediate driving decisions. The cloud supports learning, updates, diagnostics, and long-term optimization. This division creates a more practical and scalable system.
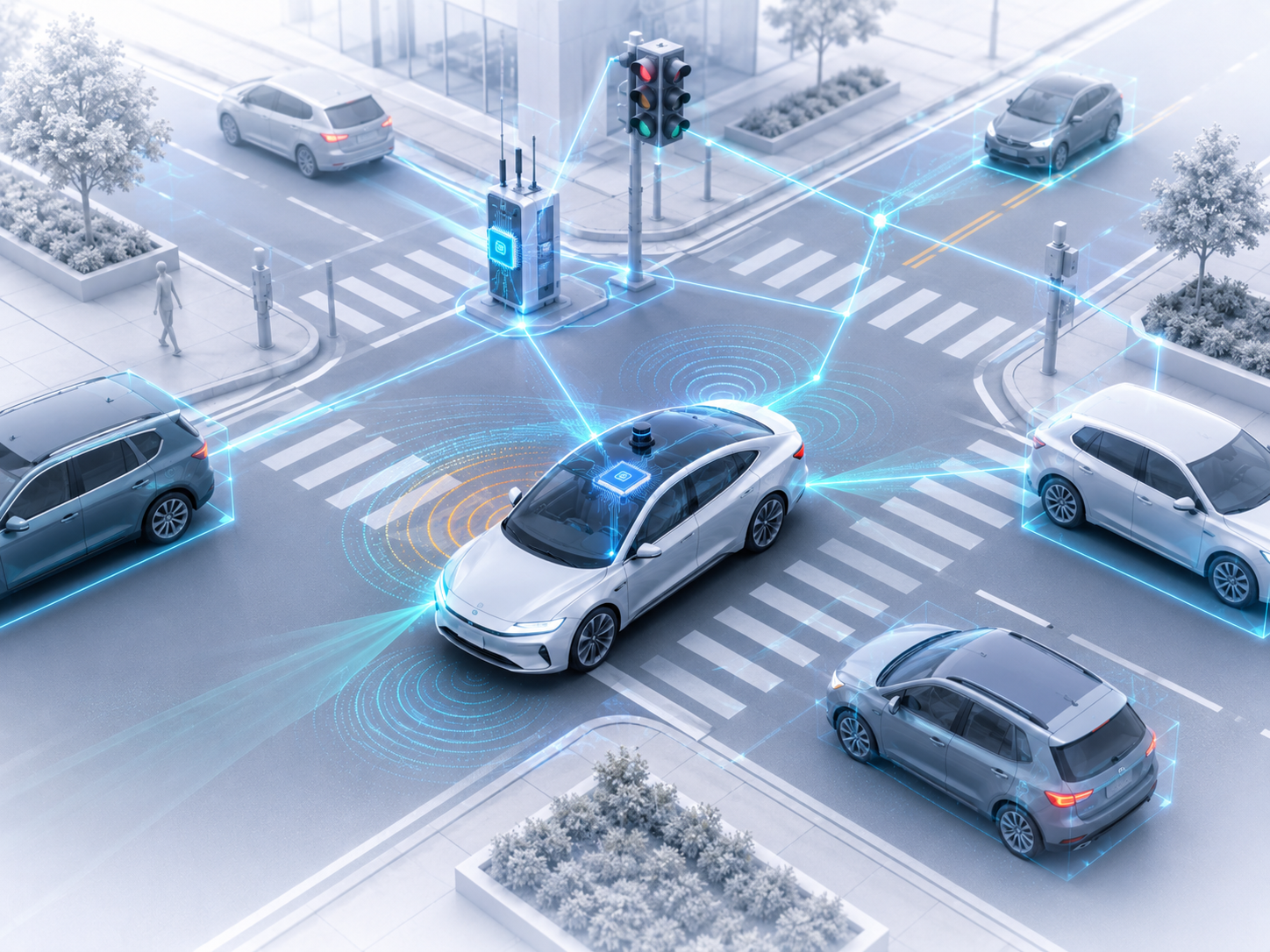
How Does V2X Edge Computing Improve Autonomous Vehicle Awareness?
V2X means vehicle-to-everything communication. It includes communication between vehicles, road infrastructure, pedestrians, networks, and other traffic participants.
V2X can help autonomous vehicles receive information that onboard sensors may not directly detect. For example, a vehicle may receive alerts about a hidden pedestrian, emergency vehicle, road construction, slippery road surface, or traffic signal phase.
Edge computing improves V2X because local roadside computing nodes can process traffic data near the source. Instead of sending all information to a distant cloud, roadside edge devices can analyze intersection conditions, detect congestion, and send timely alerts to nearby vehicles.
This is especially useful in urban areas where many vehicles, pedestrians, cyclists, and traffic signals interact at the same time.
- Intersection collision warning
- Traffic light timing information
- Cooperative perception
- Emergency vehicle priority
- Smart parking guidance
- Road hazard notification
- Fleet and logistics route optimization
For autonomous vehicles, V2X does not replace onboard sensors. It expands the vehicle awareness. The onboard edge system and roadside edge system can work together to create a broader traffic intelligence network.
What Hardware Is Needed for Edge Computing in Autonomous Vehicles?
Autonomous vehicle edge computing requires a combination of high-performance processing, stable power, fast data transmission, and automotive-grade durability.
AI Processors and SoCs
These chips handle deep learning inference, image processing, sensor fusion, and decision support. They are often the core of the autonomous driving domain controller.
Memory and Storage
High-speed memory supports real-time data processing. Storage may be used for system logs, driving data, maps, and event recording.
Sensor Interface Circuits
Camera, radar, LiDAR, and ultrasonic sensor data must be transferred reliably to the processing unit. High-speed interfaces require careful PCB layout.
Power Management Circuits
Automotive electronics must handle voltage changes, load variation, transient events, and thermal stress. Stable power delivery is essential for edge computing modules.
Communication Modules
Ethernet, CAN, LIN, PCIe, SerDes, and wireless communication may be used depending on system architecture.
Thermal Management Components
AI computing generates heat. Heat sinks, thermal vias, copper planes, metal-core structures, and suitable materials may be needed.
Automotive-Grade PCB and PCBA
The printed circuit board must support high-density routing, controlled impedance, thermal reliability, vibration resistance, and long-term stability.
In practical engineering, hardware reliability is just as important as computing performance. A powerful edge AI module must also survive real automotive environments.
What Are the PCB and PCBA Requirements for Automotive Edge Computing Modules?
Edge computing modules in autonomous vehicles place high demands on PCB and PCB assembly manufacturing. These boards may carry high-speed signals, dense components, powerful processors, and multiple sensor interfaces in a compact space.
High-Density Interconnect Design
AI processors, memory chips, and high-speed interfaces often require HDI PCB structures. Microvias, fine traces, and controlled layer stack-ups help support compact routing.
Controlled Impedance
High-speed signal lines must maintain stable impedance. This is important for Ethernet, PCIe, SerDes, camera interfaces, and other fast data channels.
Thermal Design
Edge AI chips may generate considerable heat. PCB design may require heavy copper areas, thermal vias, metal-core substrates, copper coins, or optimized heat spreading paths.
Automotive Reliability
Automotive boards must withstand vibration, temperature cycling, humidity, and long operating lifetimes. Material selection, solder joint quality, and process control affect final reliability.
EMI and EMC Control
Autonomous vehicle electronics work near many sensitive systems. PCB layout must reduce electromagnetic interference and support stable signal integrity.
Power Integrity
AI processors need clean and stable power. Poor power design can affect system behavior, signal quality, and long-term reliability.
Assembly Quality Control
Fine-pitch BGAs, QFNs, high-density connectors, and automotive-grade components require precise SMT assembly. AOI, X-ray inspection, first article inspection, functional testing, and traceability are important parts of the process.
For automotive edge computing modules, PCB manufacturing is not only about producing a board. It is about supporting a reliable electronic platform for real-time vehicle intelligence.
What Challenges Exist in Autonomous Vehicle Edge Computing?
Edge computing gives autonomous vehicles many advantages, but engineering teams still need to solve several design challenges.
Computing Power and Energy Efficiency
Autonomous driving requires strong AI processing. At the same time, automotive systems must manage power consumption and heat. Efficient hardware architecture is essential.
Thermal Management
High-performance processors can create hot spots. Thermal design must be considered from the PCB stack-up stage, not only after the enclosure is designed.
Data Synchronization
Camera, radar, LiDAR, GPS, and vehicle control data must be aligned correctly. Poor synchronization may affect perception accuracy.
Functional Safety
Driving-related electronics must be designed with safety concepts, redundancy, diagnostics, and predictable failure behavior.
Cybersecurity
Connected vehicles exchange data with networks and infrastructure. Edge systems need secure communication, firmware protection, and controlled update mechanisms.
Manufacturing Consistency
A design that performs well in prototype testing must also be manufacturable at scale. DFM review, material control, component sourcing, and process traceability help reduce production variation.
These challenges can be managed with early engineering review. For PCB and PCBA projects, it is useful to check stack-up, impedance, thermal design, component availability, test points, connector layout, and production feasibility before mass production.
What Is the Future of Edge Computing in Autonomous Vehicles?
The future of autonomous driving will likely depend on stronger edge intelligence, better vehicle connectivity, and more reliable automotive electronics.
First, vehicles are moving toward centralized computing architectures. Instead of using many separate ECUs, some vehicle platforms use powerful domain controllers or central computing units.
Second, AI models are becoming more capable. Vehicles may process more sensor inputs, more complex road scenes, and more prediction tasks locally.
Third, V2X and smart infrastructure may expand vehicle awareness. Roadside edge nodes can help vehicles understand traffic conditions beyond direct sensor range.
Fourth, manufacturing quality will become more critical. As autonomous driving electronics become more integrated, a small PCB or assembly issue may affect a complex system. Automotive PCB suppliers and PCBA manufacturers need strong process control, inspection, testing, and traceability.
How Can a PCB and PCBA Manufacturer Support Autonomous Vehicle Edge Computing Projects?
A reliable PCB and PCBA manufacturing partner can support autonomous vehicle edge computing projects from early engineering review to production delivery.
For these projects, the manufacturer should understand both board-level requirements and system-level risks. This includes high-speed routing, impedance control, thermal design, automotive material selection, component sourcing, SMT process control, inspection, and test planning.
At EBest Circuit (Best Technology), we support PCB fabrication, component sourcing, PCBA assembly, DFM review, BOM optimization, testing, and production-quality control for automotive electronics, industrial control, communication equipment, medical electronics, aerospace, and other high-reliability applications.
For edge computing modules used in autonomous vehicles, our engineering team can help review:
- PCB stack-up and material selection
- Controlled impedance requirements
- Thermal design and heat dissipation paths
- BGA and fine-pitch component assembly feasibility
- Automotive-grade component sourcing
- DFM issues before production
- AOI, X-ray, electrical testing, and functional test requirements
- Traceability requirements from prototype to batch production
If your project involves ADAS modules, automotive control boards, AI edge computing hardware, V2X communication modules, or high-reliability PCBA assembly, you can send your Gerber files, BOM, and assembly drawings to sales@bestpcbs.com for engineering review and quotation support.
FAQs About Edge Computing in Autonomous Vehicles
What is edge computing in autonomous vehicles?
Edge computing in autonomous vehicles refers to processing driving data locally inside the vehicle or near the vehicle instead of sending all data to a remote cloud.
Why is edge computing important for self-driving cars?
It is important because autonomous vehicles need fast response. Local processing helps reduce latency, improve safety-related decisions, and maintain key functions when network connectivity is limited.
Is edge computing the same as edge AI?
Not exactly. Edge computing is the overall approach of processing data near the source. Edge AI means running artificial intelligence models on edge hardware. In autonomous vehicles, edge AI is one part of the edge computing system.
Does autonomous driving still need cloud computing?
Yes. Cloud computing is useful for AI model training, HD map updates, fleet data analysis, software updates, and long-term system optimization. Real-time driving decisions are mainly handled by edge systems.
How does V2X edge computing help autonomous vehicles?
V2X edge computing allows vehicles and roadside systems to exchange and process traffic information locally. It can support intersection warnings, road hazard alerts, signal timing information, and cooperative perception.
What sensors are used in autonomous vehicle edge computing?
Common sensors include cameras, radar, LiDAR, ultrasonic sensors, GPS, IMUs, and vehicle control sensors. Edge computing systems process and combine this data for real-time driving awareness.
What PCB types are used in autonomous vehicle edge computing modules?
Depending on the design, these modules may use HDI PCBs, multilayer FR4 PCBs, high-Tg PCBs, rigid-flex PCBs, heavy copper PCBs, or thermally enhanced PCB structures.
Why is thermal design important in edge computing hardware?
AI processors and high-speed chips can generate heat. Good thermal design helps maintain stable operation, protect component life, and support reliable vehicle performance.
What should engineers check before manufacturing an automotive edge computing PCBA?
Engineers should check stack-up, impedance, power integrity, thermal paths, component availability, assembly feasibility, test points, connector layout, and automotive reliability requirements.
Can EBest Circuit support automotive edge computing PCB and PCBA projects?
Yes. EBest Circuit supports PCB manufacturing, component sourcing, PCBA assembly, DFM review, BOM optimization, inspection, testing, and production-quality support for automotive electronics and high-reliability applications.
For automotive PCB and PCBA manufacturing support, contact EBest Circuit at sales@bestpcbs.com.